Stampa 3D

La stampa 3D
Non c’è una vera e propria data di nascita della stampa 3D. Dal progetto RepRap, di cui parleremo nel prossimo paragrafo e nei capitoli a seguire, è scaturita l’idea di base della stampante 3D, ovvero di una stampante basata su tre assi, come evoluzione della più semplice stampante a due dimensioni, nota anche come stampante in piano. In pratica, si è pensato di aggiungere la terza dimensione z alle due dimensioni spaziali che sul piano cartesiano sono definite come x e y. Riprendendo una semplice nozione di geometria solida, la terza dimensione consente di creare oggetti nello spazio tridimensionale, aggiungendo la profondità a larghezza e altezza. La realtà che siamo in grado di percepire con occhi e cervello è sempre stata oggetto di curiosità scientifica che ha portato a invenzioni nei settori dell’ottica (si pensi al cinema e alla televisione in 3D). Ma poter creare oggetti solidi a costi accessibili a tutti è un fatto recente. Se oggi possiamo stampare in casa un qualsiasi oggetto solido con poche centinaia di euro, dobbiamo fortemente ringraziare Adrian Bowyer, il responsabile del progetto RepRap (si veda più avanti).
Come vedremo, la difficoltà costruttiva di una stampante 3D, soprattutto per il movimento dell’asse z, è stata risolta con vari metodi nell’arco degli anni.
Coloro che non pensano a una soluzione RepRap autocostruita, alla fine di questo capitolo possono trovare molte indicazioni utili offerte dal mercato. Un mercato in continua espansione con il quale, per ovvi motivi, questo libro non può tenere il passo. Per fortuna, le risorse in Rete non mancano; un buon sito per tenersi aggiornati è sicuramente Stampa 3D forum (http://www.stampa3d-forum.it).
Tipi di stampante 3D
Nel già affollato panorama delle stampanti 3D, l’elenco dei tipi di stampanti si sta quotidianamente espandendo. Innanzitutto, nella trattazione di questo libro sono stati volutamente eliminate le stampanti 3D cosiddette industriali o destinate a uno specifico uso professionale. Questo perché sarebbe impensabile e fuori luogo trattare un argomento così vasto. Lo smanettone di turno, per quanto sia sempre interessato alla tecnologia, non potrebbe accedervi a costi così elevati. Per fare qualche esempio, esistono stampanti 3D per lavorazioni di protesi dentarie, per la biomeccanica di organi umani, per colate di argilla e così via. Ovviamente, sono macchine industriali dai costi esorbitanti, non certamente destinate al grande pubblico.
Per dovere di cronaca, ci limitiamo a elencare le varie tecniche di stampa 3D usate nel campo industriale, descrivendo in breve il loro funzionamento.
Selective Laser Sintering (SLS): potrebbe essere tradotta come “sinterizzazione laser selettiva”. Si tratta di una tecnica di produzione additiva che utilizza un laser come sorgente di sinterizzazione del materiale in polvere. Il laser viene diretto nei punti dello spazio definito da un modello 3D per creare una struttura solida tramite sinterizzazione. A differenza della fusione, il processo termico della sinterizzazione è specificamente indicato per l’uso di polveri. Il prodotto finito è completamente liscio, senza la tipica rugosità (anche se minima) della tecnica FDM (si veda più avanti in questo capitolo). I costi di una stampante SLS sono ancora proibitivi, ma una piccola start-up italiana con sede in Gran Bretagna, Norge LTD, è riuscita ad avviare un crowdfunding per la realizzazione di una stampante SLS in formato desktop dai costi accessibili. Il nome della stampante è Ice9; è disponibile un video all’indirizzo http://vimeo.com/norgeltd (Figura 1.1a).
Selective Laser Melting (SLM): la tecnica è basata sullo stesso principio della stampa SLS, solo che il processo di fusione a laser interessa materiali in polvere metallica. È un processo di fabbricazione additivo che sfrutta l’energia di un fascio laser ad alta potenza (solitamente un laser a fibra drogata con itterbio) per creare perfette strutture metalliche tridimensionali praticamente senza alcuna rugosità.
Stereolitografia (STL): questa tecnica usa una vasca riempita con una speciale resina liquida in grado di polimerizzare se viene esposta alla luce. Un laser viene proiettato da un sistema di specchi in modo da effettuare una scansione della superficie. Un pistone abbassa la vasca con la resina liquida per successive scansioni. Il processo di scansione si ripete fino a completare l’oggetto tridimensionale. Al termine, l’oggetto viene estratto dalla resina liquida ed esposto a luce ultravioletta per completare la polimerizzazione (Figura 1.1b).
Electron Beam Melting (EBM): la tecnica di fusione a fascio di elettroni è simile alla tecnica SLM vista prima, con la differenza che l’energia di fusione viene prodotta da un fascio di elettroni.
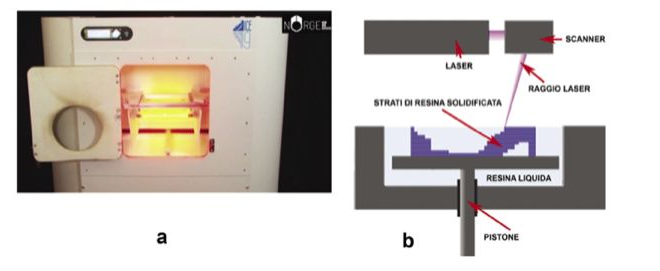
Figura 1.1 La stampante Ice9 di Norge LTD basata sulla tecnica SLS (a). Principio di funzionamento della stereolitografia (b).
Il progetto RepRap
RepRap è un’abbreviazione di Replicating Rapid Prototyper. È stato inventato da Adrian Bowyer, e la prima bozza del progetto apparve in Rete per la prima volta nel febbraio 2004.
Adrian Bowyer è un ingegnere e matematico britannico. Nato nel 1952 a Londra, Bowyer entra a far parte del Dipartimento di Matematica presso l’Università di Bath, e durante gli anni di insegnamento inventa insieme a David Watson l’algoritmo per il calcolo dei diagrammi di Voronoi. L’invenzione più eclatante però gli venne in mente quando si ritirò dalla vita accademica: una stampante 3D autoreplicante alla portata di tutti e soprattutto libera da ogni vincolo commerciale.
Il significato di questa invenzione può essere sfuggito ai più ma, sentendo parlare di RepRap, gli amanti del fai da te e dell’open source si misero rapidamente all’opera e già nel 2005 cominciarono a divulgare le idee e a migliorare i primi prototipi costruiti dal team RepRap, facendo nascere in poco tempo quel movimento inarrestabile di cui oggi vediamo i risultati.
Seguendo i principi del movimento del software libero, una macchina RepRap può venire costruita in casa sfruttando i modelli per la stampa dei pezzi che possono essere replicati da un amico, senza alcun costo per licenze di software o hardware.
Con una spesa molto limitata, chiunque oggi può costruirsi una stampante 3D e soprattutto favorire l’amico che vuole costruirsi la stessa stampante. Chi non è portato al fai da te e non desidera realizzare la stampante 3D in casa, può affidarsi al mercato (si veda più avanti).
Sul sito ufficiale RepRap, all’indirizzo http://reprap.org, si possono trovate tonnellate di informazioni e soprattutto istruzioni per la costruzione della propria RepRap, oltre a scaricare i file di stampa di tutti i componenti meccanici in plastica.
Fra le molte risorse disponibili in Rete, citiamo la rivista gratuita RepRap Magazine (http://reprapmagazine.com, in inglese), scaricabile anche in PDF ad alta risoluzione.
Stampanti domestiche
Fra i diversi metodi possibili di creazione di oggetti solidi, questo libro parlerà esclusivamente del metodo a estrusione di materiali, che è la tecnica più largamente utilizzata nelle stampanti domestiche.
La tecnica impiegata è di tipo FFF (Fused Filament Fabrication) cioè di “fabbricazione con filamento fuso”, termine coniato dalla precedente tecnica FDM (Fused Deposition Modeling) ovvero “modellazione a deposizione fusa”. Entrambe si basano sulla colata stratificata di materiali plastici resi liquidi.
Il principio della colata è di tipo additivo, per cui ogni strato depositato viene ricoperto da quello successivo creando sovrapposizioni che possono creare rugosità, a seconda del materiale, delle dimensioni del filamento e dell’estrusore e della precisione della colata.
Il risultato di una stampa di questo tipo non è certo paragonabile a quello ottenuto con le tecniche industriali a laser, ma il rapporto qualità/costi è sicuramente più vicino alle aspettative del grande pubblico. In base al proprio budget, si potrà scegliere la soluzione migliore, che di solito coincide con la più costosa. La Figura 1.2 illustra il principio di funzionamento della tecnica a estrusione o FFF.
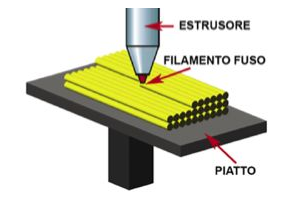
Figura 1.2 Principio di funzionamento della tecnica a estrusione o FFF (Fused Filament Fabrication).
I modelli di stampanti 3D che si sono maggiormente diffusi in ambito domestico sono stanzialmente quattro:
Darwin;
Mendel;
Deltabot;
Prusa.
Anche se sarebbe interessante approfondirli tutti, in questo libro verrà trattato solo il modello Prusa, quello più largamente usato in ambito amatoriale, il più economico e anche il più semplice da costruire o da assemblare.
Darwin
La Figura 1.3 illustra un tipico esempio del modello Darwin assieme al suo creatore Adrian Bowyer e al suo collaboratore Vik Olliver. Come si può vedere, il concetto di spazio tridimensionale è stato risolto pensando a un cubo. Il nome Darwin è un omaggio a Charles Robert Darwin (1809-1882), il famoso naturalista britannico che ha dato origine alla teoria dell’evoluzione delle specie animali e vegetali. Allo stesso modo di Darwin, che scoprì nuove specie di esseri viventi evolute da specie precedenti, il progetto RepRap si basa sulla continua evoluzione di specie di stampanti 3D.
Il funzionamento di una stampante Darwin è molto semplice. Due motori muovono l’estrusore sugli assi x e y, mentre il piatto sottostante scende sull’asse z. Un quarto motore regola l’avanzamento del filamento all’interno dell’estrusore.
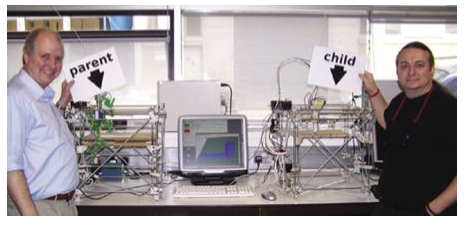
Figura 1.3 Adrian Bowyer (a sinistra) e Vik Olliver (a destra) con la prima macchina RepRap modello Darwin (genitore) e la prima macchina Darwin (figlia) generata dalla RepRap a sinistra.
Mendel
La Figura 1.4 illustra un tipico esempio del modello Mendel. La macchina è un’evoluzione del modello Darwin, chiamato “Mendel” in onore al padre della genetica Gregor Johann Mendel (1822-1884). Se Mendel è stato il precursore della moderna indagine genetica sui caratteri ereditari, anche la stampante che prende il suo nome può dirsi precorritrice delle numerose varianti, nel pieno rispetto del “progetto evoluzionistico” della stampa 3D.
Si tratta della seconda versione migliorata di stampante RepRap, pensando a un’occupazione di spazio minore, in modo da farla stare su una scrivania. Si è poi visto successivamente che tutti i costruttori si sono orientati a creare aree di stampa maggiori.
Il suo funzionamento si basa su due motori che muovono il piatto sottostante sugli gli assi x e y, mentre un terzo motore alza l’estrusore in senso verticale sull’asse z.
Il vantaggio rispetto al modello Darwin è il minor ingombro della struttura reggente.
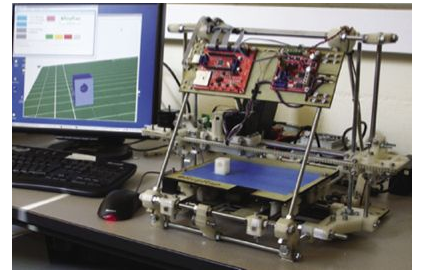
Figura 1.4 Stampante 3D modello Mendel.
Deltabot
La stampante Deltabot è originata dal progetto Delta Robot, un robot cosiddetto parallelo, costituito da tre bracci oscillanti su un piano fisso. Ci sono state parecchie varianti di questo modello, di cui ricordiamo i modelli Kossel e Rostock. Nella Figura 1.5 è visibile la stampante costruita da Johann Rocholl a Seattle nel 2012.
Il funzionamento si basa sul movimento dei tre bracci che si muovono sui tre assi tenendo l’estrusore perpendicolare al piano sottostante, che rimane fisso.
Le stampanti Deltabot sono molto veloci e molto precise, ma la loro particolare costruzione le rende leggermente più costose delle altre.
Prusa
I caratteri genetici della stampante Mendel si ritrovano in quello che oggi viene chiamato progetto RepRap Prusa Mendel o, semplicemente, Prusa.
Anche se si tratta di un “adattamento” più che di un’evoluzione della stampante Mendel, dobbiamo ringraziare il suo inventore Josef Prusa che ha voluto condividere liberamente le sue idee a beneficio del progetto RepRap.
Il sito ufficiale di Josef Prusa (in lingua ceca e parzialmente tradotto in inglese) si trova all’indirizzo http://josefprusa.cz.
Nel momento in cui scriviamo, sono state elaborate tre varianti Prusa, chiamate iteration 1, iteration 2 e iteration 3, abbreviate come i1, i2 e i3. La Figura 1.6 illustra un modello Prusa iteration 3. Il termine iteration significa iterazione, ed è stato preso in prestito dal linguaggio informatico. L’iterazione è una funzione ciclica, ed essendo il lavoro di una stampante una continua ripetizione di cicli, il termine sembra proprio azzeccato.
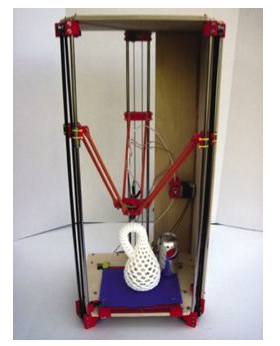
Figura 1.5 Esempio di stampante 3D modello Deltabot.
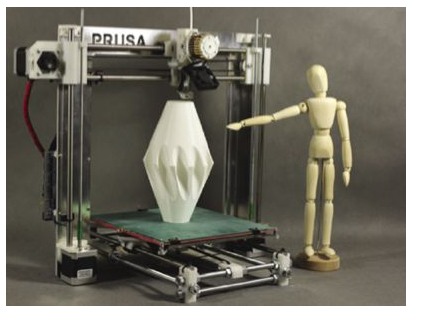
Figura 1.6 Stampante 3D modello Mendel Prusa iteration 3.
Il funzionamento è identico a quello di una stampante Mendel e le migliorie sono rivolte esclusivamente alle parti meccaniche, ai componenti in plastica e al posizionamento dei motori, allo scopo di semplificare la costruzione e di aumentare la precisione. Nella stampante 3D iteration 3 due motori muovono il piatto sugli assi x e y, mentre l’estrusore viene fatto salire da due motori sull’asse z. Questi due motori sono posti in basso invece che in alto rispetto al modello Prusa iteration 2. Nei Capitoli 3 e 4 verranno trattati i modelli iteration 3 e iteration 2.
Come funziona una stampante 3D
Una stampante 3D del tipo “a estrusione” o FFF può essere schematizzata in questo modo:
motore asse x;
motore asse y;
motore asse z;
estrusore;
piatto;
scheda di controllo;
alimentazione.
Come abbiamo visto, a seconda del modello base di riferimento, si possono posizionare i motori in modo molto diverso. Ricordiamo che in questo libro si farà riferimento ai modelli Mendel Prusa i2 e i3.
Motori per gli assi x, y e z e per l’estrusore
A prescindere dal tipo di stampante scelto, il telaio che sorregge la struttura del piatto e dei motori dev’essere controllato da una scheda di controllo dotata di driver per i cosiddetti motori stepper, altrimenti conosciuti come motori passo-passo. Si usano questi motori per ottenere maggiore velocità e precisione, oltre a garantire una coppia elevata e un momento torcente estremamente efficace. Nella Figura 1.7 è illustrato un tipico motore stepper per stampanti 3D, modello Nema 17, con coppia pari a 3,17 chilogrammi su centimetro quadrato. I motori stepper utilizzati sono solitamente cinque (uno per l’asse x, uno per l’asse y, due per l’asse z e uno per l’estrusore) e devono essere tutti dello stesso tipo.

Figura 1.7 Motore stepper modello Nema 17.
Estrusore
L’estrusore è la parte più delicata della stampante. Dal suo corretto funzionamento dipende molto la qualità di stampa. Nella Figura 1.8 viene illustrato lo schema di funzionamento tipico di un estrusore. Il filamento in materiale plastico viene fatto passare attraverso una camera riscaldata ad alta temperatura. Da qui, tramite la spinta di un pignone collegato a un motore stepper, la plastica liquida viene espulsa dall’ugello.
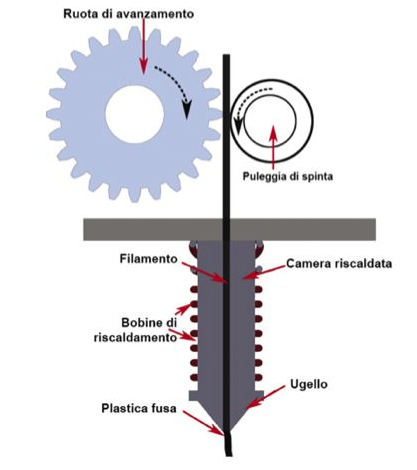
Figura 1.8 Principio di funzionamento di un estrusore.
Piatto
Il piatto della stampante 3D serve a raccogliere il materiale fuso dall’estrusore, ovvero l’oggetto 3D stampato. Solitamente si tratta di un quadrato in alluminio, percorso da una serie di resistenze sottoposte a tensione continua per venire riscaldato (Figura 1.9).
Sopra il piatto viene posto uno specchio o un vetro per fare in modo che la superficie sia perfettamente piana. La colata di plastica viene parzialmente riscaldata nel momento del contatto perché possa attaccarsi alla base.
Scheda di controllo
Esistono decine di tipi di schede per il controllo dei motori, della temperatura dell’estrusore e di quella del piatto riscaldato. Normalmente sono tutte basate su processori in grado di pilotare transistor di potenza.
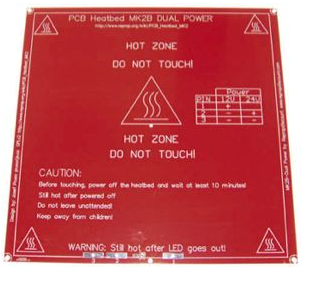
Figura 1.9 Piatto riscaldato.
Le più diffuse schede di controllo per stampante RepRap sono le seguenti:
4pi;
Generation 7 Electronics;
Melzi;
PiBot (Repetier Motherboard);
RAMPS;
Sanguinololu;
SmoothieBoard;
Duet;
Alligator Board;
RADDS;
SAV_MKI;
Replicape.
Per gli scopi di questo libro verrà trattata solamente la scheda di controllo RAMPS, acronimo di RepRap Arduino Mega Pololu Shield (Figura 1.10). È sicuramente la scheda più usata e quella che ha fornito l’ispirazione a molte variazioni sul tema. La scheda è compatibile con Arduino Mega 2560 o similari.
Alimentazione
Non meno importante è la sezione di alimentazione, che serve a mantenere in vita tutto il sistema. Solitamente viene usato un alimentatore switching, del tipo simile a quelli usati nei computer, con potenza sufficiente a reggere il lavoro dei motori, dell’estrusore e del piatto riscaldato. Un alimentatore di circa 300-400 watt è sufficiente nella maggior parte dei casi.
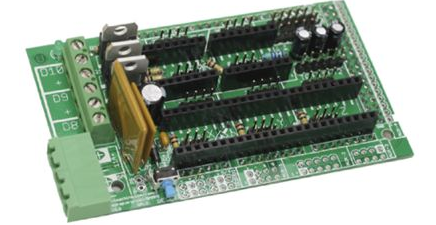
Figura 1.10 Scheda di controllo RAMPS (RepRap Arduino Mega Pololu Shield).
Come funziona la stampa 3D
Si può schematizzare l’insieme degli elementi del processo di stampa 3D in questo modo:
software di modellazione 3D;
software di gestione della stampa 3D;
materiale di stampa (filamento).
Software di modellazione 3D
La stampa 3D permette di riprodurre un oggetto reale realizzato prima con un software di modellazione 3D. Fra i software più diffusi, citiamo i seguenti.
Blender: senza dubbio il miglior software open source per la modellazione, il rendering e l’animazione 3D. È in grado di importare ed esportare file in vari formati, tra cui .obj e .stl. Disponibile per Windows, Linux e OS X.
FreeCAD: software gratuito e open source per la modellazione CAD parametrica, in grado di gestire vari formati, tra cui .stl. Disponibile per Windows, Linux e OS X.
MeshLab: software open source per la creazione e la modifica di oggetti tridimensionali (chiamati mesh). È in grado di aprire file in formato PLY o OBJ. Disponibile per Windows, Linux, OS X e per dispositivi mobili iOS e Android.
Autodesk 123D Catch: software in grado di creare modelli tridimensionali elaborando una serie di fotografie di un oggetto. Disponibile per Windows XP, Windows 7 e come app per iPhone e iPad. È possibile utilizzare il software anche online, usando Google Chrome come browser e registrandosi sul sito Autodesk.
Autodesk 123D Design: questo programma serve alla modellazione digitale degli oggetti tridimensionali. Tramite il sito è inoltre possibile richiedere la stampa tridimensionale degli oggetti modellati. Disponibile per Windows 7 e OS X e come app per iPad (si veda il Capitolo 7 per maggiori informazioni su questo programma).
Google SketchUp: software di disegno 3D offerto gratuitamente da Google per utenti meno esperti. Molto semplice da usare e dotato di interfaccia in italiano.
A prescindere dall’applicazione software impiegata per disegnare il modello 3D, per la stampa viene usato il formato di esportazione STL, un particolare formato a cui ricorre gran parte dei programmi CAD e di modellazione 3D. Se il programma scelto non esporta nel formato STL, è possibile trovare molti convertitori di formato.
STL (STtereoLitography) è un formato di file nativo per il software di stereolitografia CAD creato dall’azienda americana 3D Systems. STL è anche conosciuto come Standard Tessellation Language ed è supportato da molti pacchetti software.
A differenza di un file CAD, il file STL descrive solo la geometria della superficie di un oggetto tridimensionale, senza alcuna rappresentazione del colore o altri attributi rispetto al modello CAD. Le figure geometriche, comprese le superfici curve, vengono descritte da una serie di triangoli strutturati in modo vettoriale, come illustrato nella Figura 1.11.
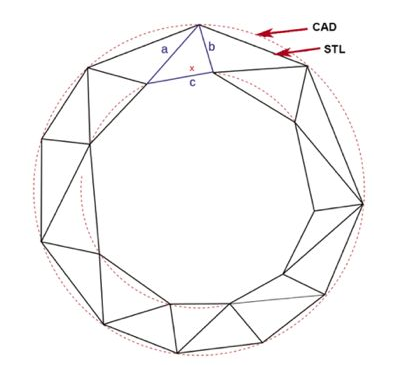
Figura 1.11 Rappresentazione di un file CAD e la sua conversione in formato STL.
Software di gestione della stampa 3D
Una volta realizzato il file STL con un programma di modellazione 3D, è necessario importarlo in un software di gestione per la stampa 3D.
Fra i molti software open source disponibili, quelli che verranno trattati nei prossimi capitoli sono i seguenti:
Cura;
Slic3r;
Repetier Host.
Essendo il formato STL un file privo di informazioni relative alle dimensioni e di altre indicazioni spaziali, verrà convertito in un formato leggibile dal software di gestione della stampante 3D. A questo scopo convertito nel formato Codice G, o G-Code in inglese.
Il formato G-code è identico a quello usato per le macchine CNC (Computer Numerical Control) ed è certo che la tecnologia CNC sia stata fortemente responsabile dello sviluppo della stampa 3D. Il controllo numerico basato sul formato G-code può venire tradotto più facilmente in comandi specifici per muovere i motori lungo le coordinate x, y e z della stampante.
Il linguaggio G-code è basato su istruzioni codificate, seguite da uno o più parametri numerici. Per esempio, le istruzioni possono essere di questo tipo:
G0 Traslazione in RAPIDO degli ASSI
G1 Interpolazione lineare degli assi alla F programmata
G2 Interpolazione circolare ORARIA
G3 Interpolazione circolare ANTIORARIA
G4 Pausa temporizzata
G10 Abilita OVERRIDE ASSI esterno su potenziometro
G11 Disabilita OVERRIDE ASSI esterno su potenziometro
G17 Piano di interpolazione su X-Y
G18 Piano di interpolazione su Z-X
G19 Piano di interpolazione su Y-Z
G20 Programmazione quote in pollici
G21 Programmazione quote in millimetri
…
G100 Comando sincrono per asse VIRTUALE
G101 Comando STOP ASSI nel punto attuale
… e così via.
Usando queste istruzioni, ecco un esempio di listato G-code convertito da un file STL:
M140 S70.000000
M109 T0 S240.000000
T0
M190 S70.000000
;M190 S70 ;Uncomment to add your own bed temperature line
;M109 S240 ;Uncomment to add your own temperature line
G21 ;metric values
G90 ;absolute positioning
M82 ;set extruder to absolute mode
M107 ;start with the fan off
G28 X0 Y0 ;move X/Y to min endstops
G28 Z0 ;move Z to min endstops
G1 Z15.0 F9000 ;move the platform down 15mm
G92 E0 ;zero the extruded length
G1 F200 E3 ;extrude 3mm of feed stock
G92 E0 ;zero the extruded length again
G1 F9000
;Put printing message on LCD screen
M117 Printing...
;Layer count: 168
;LAYER:0
M107
G0 F9000 X89.221 Y90.943 Z0.300
G0 X90.056 Y90.276
;TYPE:SKIRT
G1 F1200 X90.974 Y89.811 E0.02420
G1 X92.018 Y89.506 E0.04977
G1 X93.157 Y89.459 E0.07657
G1 X93.314 Y89.461 E0.08027
G1 X93.622 Y89.460 E0.08751
G1 X94.487 Y89.460 E0.10785
G1 X94.498 Y89.461 E0.10811
G1 X95.090 Y89.460 E0.12203
…
Il file G-code diventa facilmente leggibile dal software di gestione di una stampante 3D; come si può vedere, si tratta di un normalissimo file ASCII in cui si riconoscono perfettamente le istruzioni e i comandi. Notare che nel file sono stati inseriti in modo automatico anche i codici M, previsti per il controllo della macchina.
Il mercato delle stampanti 3D
In virtù della libera commercializzazione di stampanti RepRap, il mercato oggi sta esplodendo con offerte a tutti i livelli.
Ce ne sono per tutti i gusti: in kit completi per la costruzione fai da te oppure come parti staccate per la costruzione a basso livello. Non parliamo della pletora di modelli commerciali pronti all’uso! Solo per citare alcuni marchi fra i più diffusi e con prezzi accessibili, ecco un elenco non esaustivo di stampanti 3D, accompagnato da brevi descrizioni delle caratteristiche principali fornite dai relativi produttori.
Ultimaker
La Ultimaker Original (https://www.ultimaker.com, Figura 1.12) è una stampante 3D disponibile anche in kit di montaggio. La sua particolarità è nel piatto: è posto sull’asse z su una specie di cavalletto sospeso, mentre il movimento dell’estrusore è sugli assi x e y. In pratica, ricalca lo stile di una Darwin (anche nell’aspetto cubico) con il piatto che sale invece di scendere. Le finiture sono in legno sagomate con taglio laser.
Caratteristiche principali
Area di stampa (mm): 210 × 210 × 205.
Estrusore (mm): 0,4.
Definizione di stampa: minima 40 micron, massima 0,4 mm.
Precisione degli assi: circa 40 micron.
Scheda: Arduino Mega 2560.
Rumorosità: 52 Db.
Ultimaker offre il download diretto del suo software open source Cura, divenuto uno standard di stampa 3D e di cui parliamo diffusamente nel Capitolo 6.
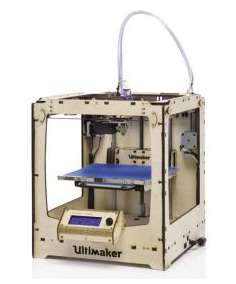
Figura 1.12 La stampante Ultimaker Original.
MakerBot
Fra i diversi modelli proposti da MakerBot (http://www.makerbot.com), segnaliamo Replicator Mini, una stampante 3D compatta dal costo non proibitivo (Figura 1.13). La stampante ha il piatto sull’asse z su un cavalletto sospeso e l’estrusore sugli assi x e y. Incorpora anche webcam per le riprese video.

Figura 1.13 La stampante MakerBot Replicator Mini.
Caratteristiche principali
Area di stampa (mm): 100 × 100 × 125.
Risoluzione (mm): 0,2.
Estrusore (mm): 0,4.
Struttura: ABS con rinforzo in acciaio.
Software incluso: MakerBot Desktop.
Risoluzione camera: 320 × 240 pixel.
Printrbot
Printrbot (http://printrbot.com/) offre Simple Maker’s Kit, un modello di stampante 3D in kit fai da te interessante e a un prezzo molto accessibile (Figura 1.14). La stampante ha il piatto sugli assi x e y mentre un robusto cavalletto sospeso sull’asse z porta l’estrusore. Il kit è disponibile anche senza finiture in legno con taglio laser. Possibilità di stampare anche da SD Card.
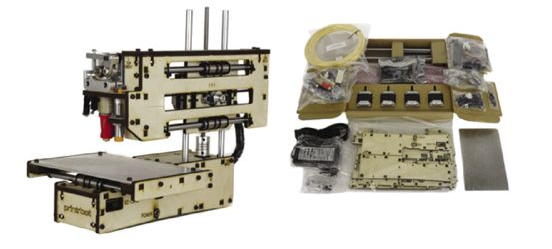
Figura 1.14 La stampante Simple Maker’s Kit di Printrbot.
Caratteristiche principali
Area di stampa (mm): 100 × 100 × 100.
Risoluzione di stampa: 100 micron.
Velocità di stampa: 60 mm/sec (consigliata.
Filamento: 1,75 millimetri PLA (campione incluso).
Estrusore (mm): 0,4.
Autolivellamento: con software per calibrare l’altezza dell’asse z.
Elettronica: Printrboard con connessione micro-USB (cavo incluso) e slot per micro SD card per la stampa standalone.
Solidoodle
Il sito di Solidoodle (http://www.solidoodle.com) offre diversi modelli indirizzati ai principianti. Il modello Solidoodle 4 è economico e, soprattutto, pronto all’uso (Figura 1.15). Viene fornito anche il software proprietario One-click, molto semplice da usare.
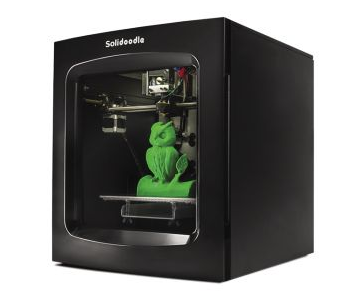
Figura 1.15 La stampante Solidoodle 4.
Caratteristiche principali
Area di stampa (mm): 200 × 200 × 200.
Filamento: 1,75 millimetri PLA.
Risoluzione (mm): fino a 0,1.
Struttura interna in acciaio.
Ventilatore con filtro dell’aria.
Elettronica montata internamente e termicamente isolata dalla camera di costruzione.
Calibrazione asse z automatica.
Supporto bobina del filamento facile da collegare.
Stampante completamente assemblata e testata.
Maker Gear
Il produttore Maker Gear (http://www.makergear.com) propone una stampante 3D disponibile anche in kit, dedicata ai maker più esigenti. Il suo design molto elegante è in alluminio anodizzato con lamiere tagliate con precisione CNC (Figura 1.16).
Figura 1.16 La stampante Maker Gear M2.
Caratteristiche principali
Area di stampa (mm): 203 × 250 × 203.
Montanti lavorati in CNC in alluminio anodizzato nero.
Guide x e y di precisione.
Filamento: 1,75 millimetri PLA (incluso).
Stepper Plastruder Maker Gear.
Risoluzione z: da 0,1 a 0,25 mm, selezionabile dall’utente fino a 0,01 millimetri.
Risoluzione: 25 micron.
Velocità di stampa: 80-200 mm/s.
Software incluso: Simplify3D.
Afinia
Afnia (http://www.afinia.com) è probabilmente la stampante 3D pronta all’uso più semplice in assoluto. Il modello H480 si presenta con un solo tasto per iniziare la stampa dal suo software incluso (Figura 1.17).
Caratteristiche principali
Area di stampa (mm): 139 × 139 × 135.
Completamente assemblata per una facile configurazione.
Software user-friendly incluso.
Risoluzione (mm): 0,15.
Autolivellamento e altezza ugello con facile calibrazione.
Viene fornita con strumenti per aiutare nella rimozione di materiale di supporto.

Figura 1.17 La stampante Afinia H480.
Deezmaker
Come si può vedere dal suo aspetto, la Bukobot 8 Duo v2 di Deezmaker (http://deezmaker.com/) è una tipica stampante in stile Prusa i3. La particolarità è il suo doppio estrusore Spitfire che consente la stampa di più oggetti contemporaneamente (Figura 1.18). Anche i cavi rinforzati al posto delle cinghie rendono il prodotto molto più affidabile. Disponibile anche in kit, il suo costo è allineato con le normali stampanti a singolo estrusore.
Figura 1.18 La stampante Bukobot 8 Duo v2 di Deezmaker. Nel riquadro il doppio estrusore.
Caratteristiche principali
Estrusori doppi, oggetti di stampa con materiale multiplo o di supporto.
Molto più facile da costruire rispetto alla maggior parte delle stampanti 3D!
Telaio in alluminio rigido per grandi stampe 3D.
Area di stampa (mm): 200 × 200 × 200.
Doppio estrusore All Metal di alta qualità Spitfire per la stampa veloce.
Scheda controller X3 Azteeg, compatibile Arduino.
Cavi sincronizzatori per asse x e y (meglio delle cinghie vecchio stile).
Velocità di stampa: 200 mm/sec.
Cube
Cube (http://cubify.com) è una stampante compatta prodotta da 3D Systems, con un’area di stampa di ben 15 × 15 × 15 centimetri e risoluzione 75 micron (Figura 1.19). Il design cubico consente di inserire il rotolo del filamento direttamente all’interno della struttura. È dotata di Wi-Fi e Bluetooth per avviare la stampa anche da una postazione remota.
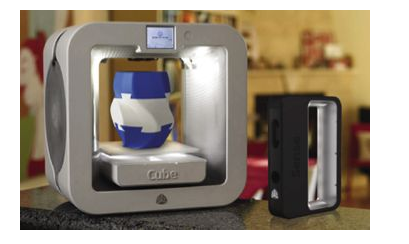
Figura 1.19 La stampante Cube prodotta da 3D Systems.
Caratteristiche principali
Area di stampa (mm): 152,4 × 152,4 × 152,4.
Risoluzione di stampa: 70 micron.
Wireless: stampa Wi-Fi con l’app Cubify per OS X e Windows.
Filamento: plastica ABS o PLA (acquistabile solo sul sito).
Viene fornito il software per creare file leggibili Cube (Win e OS X).
WASP
WASP (http://www.wasproject.it) è un produttore italiano di grande successo. Fra le sue stampanti di maggiore fascino, citiamo la DeltaWASP, basata sul modello di una Deltabot. L’area di stampa è davvero generosa e arriva a realizzare oggetti di 40 × 60 centimetri (Figura 1.20).

Figura 1.20 La stampante DeltaWASP di WASP.
Caratteristiche principali
Area di stampa (mm): diametro 400 × altezza 600.
Definizione di stampa: 100 micron
Estrusore: 0,4 mm – 0,70 mm – 0,90 mm.
Filamenti utilizzabili: 3 mm di diametro (PLA, ABS, nylon, polimeri elastici, Polistirene, Laywood).
Velocità massima: 200 mm/s.
Sharebot
Sharebot (http://www.sharebot.it/) è un altro produttore italiano orientato a costruire stampanti con una grande area di stampa. Il modello Sharebot XXL è in grado di gestire oggetti su ben 70 centimetri di larghezza (Figura 1.21).
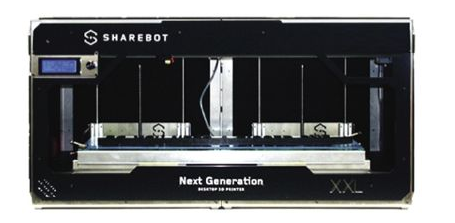
Figura 1.21 La stampante Sharebot XXL.
Caratteristiche principali
Area di stampa (mm): 700 × 200 × 200.
Estrusore (mm): 0,35.
Scocca: acciaio inox.
Carter: plexiglass.
Velocità massima: 150 cm/h.
Risoluzione (mm): 0,1.
Filamento: 1,75 mm PLA.
Blocco estrusore con regolazione pressione sul filamento.
Cuscinetti a riciclo di sfere su tutti gli assi.
Movimentazione asse z con viti trapezioidali.
Piano di stampa regolabile.
Possibilità di stampa diretta da SD Card.
DeltaMaker
DeltaMaker (http://www.deltamaker.com), è inutile dirlo, costruisce una stampante basata sul modello di una Deltabot. L’aspetto è molto accattivante e il costo accessibile (Figura 1.22).
Caratteristiche principali
Area di stampa (mm): diametro 240 × altezza 260.
Risoluzione (mm): 100 micron.
Filamento: Fused Filament Fabrication (FFF) 1,75 mm PLA.
Wi-Fi e connettività Ethernet: supporta la stampa wireless e il controllo tramite dispositivo mobile.
Oggetto stampato visualizzabile a 360 gradi.
Costruzione di estrusione in alluminio rigido.
Utilizza open source: Marlin, OctoPrint, Cura, Repetier Host e Slic3r.

Figura 1.22 La stampante DeltaMaker.
Kentstrapper
Kentstrapper (http://kentstrapper.com) è l’azienda fiorentina dei fratelli Cantini che produce e vende stampanti 3D open source. Il nome è una crasi tra “Kent” – anglicizzazione del cognome Cantini – e “strapper”, termine con cui si indicano le stampanti 3D figlie del progetto RepRap.
I modelli disponibili sono Galileo Smart e Volta Beta, entrambi basati sul modello Mendel Prusa (Figura 1.23).

Figura 1.23 La stampante Kentstrapper Galileo Smart e Volta Beta.
Caratteristiche principali
Area di stampa (mm): 200 × 200 × 160.
Risoluzione (mm): 0,09 millimetri.
Filamento: ABS, PLA e altri materiali similari.
Software open source: Cura e Repetier Host.
3Drag
Un altro prodotto italiano. Sviluppata nei laboratori di Futura Elettronica, la stampante 3Drag (http://3dprint.elettronicain.it) è in grado di stampare oggetti di 20 × 20 × 20 centimetri, utilizzando filamenti in ABS o PLA da 3 mm. È compatibile con tutti i software RepRap (Figura 1.24).

Figura 1.24 La stampante 3Drag di Futura Elettronica.
Caratteristiche principali
Area di stampa (mm): 200 × 200 × 200.
Struttura in alluminio profilato sezione quadrata da 27,5 mm di lato.
Scorrimenti con manicotti a riciclo di sfere su barre rettificate da 8 e da 10 mm.
Giunti in metallo e parti in ABS stampate a iniezione.
Estrusore (mm): 0,5 mm.
Controller: 3DCONTR-DRIVER con ATmega2560 compatibile Arduino.
Velocità di stampa: 120 mm/sec.
Risoluzione: 0,39 micron.
Arduino Materia 101
Arduino Materia 101 è la prima stampante 3D ufficiale Arduino (http://arduino.cc). Si avvale di Arduino Mega 2560 con uno schermo LCD per il controllo delle funzioni (Figura 1.25).
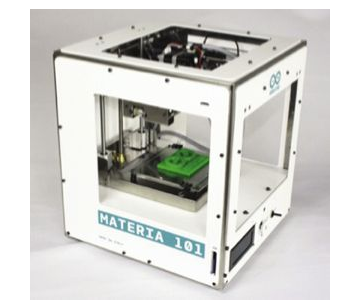
Figura 1.25 La stampante Arduino Materia 101.
È una piccola macchina con un alloggiamento in lamiera e il design volutamente semplice e facile da capire, soprattutto per i principianti o per gli hacker hardware che vogliono migliorarla o eseguire esperimenti.
Arduino Materia 101 è una macchina open source basata su tecnologia Arduino, pienamente compatibile con Slic3r, OpenSCAD e molti altri software. Questo prodotto viene consegnato completamente montato.
Caratteristiche principali
Area di stampa (mm): 140 × 100 × 100.
Spessore minimo (mm): 0,1.
Filamenti: 1,75 mm PLA.
Corpo in acciaio inox.
Carter in plexiglass.
Monitor LCD.
Risoluzione x/: 0,06 millimetri.
Risoluzione z: 0,1 millimetri.
Estrusore (diametro) (mm): 0,35.
Possibilità di stampare direttamente dalla SD card.
Dremel Idea Builder
Il colosso del bricolage Dremel (https://3dprinter.dremel.com) è entrato nel mondo delle stampanti 3D con la sua Idea Builder (Figura 1.26), una stampante molto compatta pensata per la produzione di piccoli oggetti e dotata di display touch per il controllo delle funzioni.
Caratteristiche principali
Area di stampa (mm): 230 × 150 × 140.
Estrusore: singolo.
Temperatura estrusore: fino a 230 °C.
Interfaccia operativa: touch screen IPS da 3,5" a colori.
Risoluzione: 100 micron.
SD Card: fino a 32 GB.
Memoria interna: 4 GB.
Filamento: solo PLA 1,75 millimetri.
Software: viene fornita con il software gratuito per Windows, OS X e Linux.
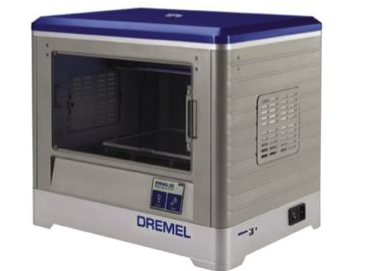
Figura 1.26 La stampante Dremel Idea Builder.
Do It Yourself RepRap
Do It Yourself RepRap (http://www.diyreprap.com) è un sito italiano che offre tutto il materiale per una RepRap fai da te. Si possono trovare parti meccaniche, parti elettriche, filamenti e accessori. È disponibile anche il kit delle parti in plastica (Figura 1.27).

Figura 1.27 Il sito italiano Do It Yourself RepRap.
Cooking Hacks
Abbiamo volutamente lasciato per ultimo questo sito di ragazzi impegnati nello sviluppo di idee per l’hobbista e lo smanettone puro.
Cooking Hacks (http://www.cooking-hacks.com) da qualche anno svolge un’attività di vendita sul Web di molti prodotti sviluppati dal proprio team di ricerca all’interno della sede di Libelium a Saragozza, nota azienda di prodotti orientati all’analisi e controllo ambientale. Cooking Hacks ha inserito nel suo catalogo anche un kit di una stampante modello Mendel Prusa i3, dal costo accessibile.
Dovendo scegliere un punto di partenza, in questo libro ci siamo affidati anche al loro kit per il montaggio di una stampante 3D completa, acquistando le parti staccate (si veda il Capitolo 3).
La Figura 1.28 illustra il kit di montaggio Cooking Hacks e il prodotto finito.
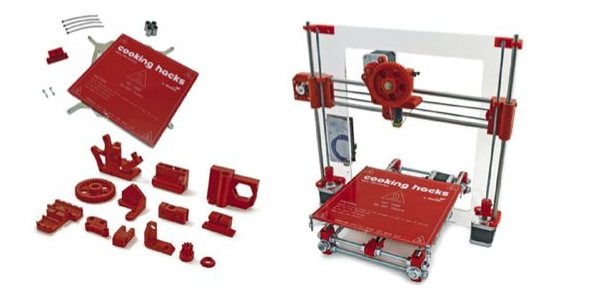
Figura 1.28 Il kit di montaggio Cooking Hacks e la stampante Mendel Prusa i3 finita.