Il Mio laboratorio
Questo è il mio laboratorio di Elettronica:

Questo è il mio laboratorio di Elettronica:
In questo tutorial impareremo come creare un Arduino Robot Arm che può essere controllato e programmato in modalità wireless utilizzando un'applicazione Android personalizzata. Ti mostrerò l'intero processo di costruzione, partendo dalla progettazione e dalla stampa 3D delle parti del robot, collegando i componenti elettronici e programmando Arduino, allo sviluppo della nostra applicazione Android per il controllo del Robot Arm

ed ecco il Braccio robot in azione:
Panoramica
Utilizzando i cursori nell'app possiamo controllare manualmente il movimento di ciascun servo o asse del braccio del robot. Utilizzando anche il pulsante "Salva", possiamo registrare ogni posizione o passaggio e quindi il braccio del robot può eseguire automaticamente e ripetere questi passaggi. Con lo stesso pulsante possiamo mettere in pausa l'operazione automatica e ripristinare o cancellare tutti i passaggi in modo che possiamo registrare nuovi.
Arduino Robot Arm Modello 3D
Il braccio ha 5 gradi di libertà.
Per i primi 3 assi, la vita, la spalla e il gomito, ho usato i servi MG996R, e per gli altri 2 assi, il polsino del polso e il polso, così come la pinza ho usato i micro servi SG90 più piccoli.

Puoi scaricare e il modello 3D qui sotto.
Link stl
https://howtomechatronics.com/tutorials/arduino/diy-arduino-robot-arm-with-smartphone-control/#
Diagramma del circuito del braccio robot Arduino
Il prossimo passo è collegare l'elettronica. Lo schema del circuito di questo progetto è in realtà piuttosto semplice. Abbiamo solo bisogno di una scheda Arduino e un modulo HC-05 Bluetooth per la comunicazione con lo smartphone. I pin di controllo dei sei servomotori sono collegati a sei pin digitali della scheda Arduino.
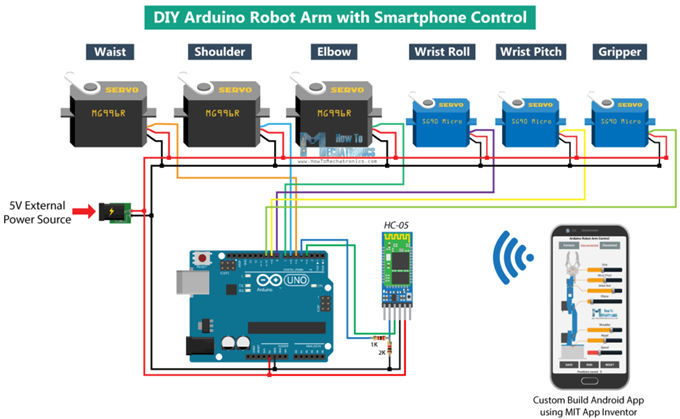
Per alimentare i servi abbiamo bisogno di 5V, ma questo deve provenire da una fonte di alimentazione esterna perché Arduino non è in grado di gestire la quantità di corrente che tutti possono disegnare. La fonte di alimentazione deve essere in grado di gestire almeno 2 A di corrente. Quindi, una volta collegato tutto insieme, possiamo passare alla programmazione di Arduino e creare l'app per Android.
È possibile ottenere i componenti necessari per questo esempio dai collegamenti seguenti:
Arduino Robot Arm Control App per Android
Diamo un'occhiata all'app per Android ora e vediamo che tipo di dati sta effettivamente inviando ad Arduino.
l'App per Android pronta per essere installata sul tuo smartphone:
link app android :Arduino_Robot_Arm_Control.apk